Kit İçeriği: Kit İçeriği:
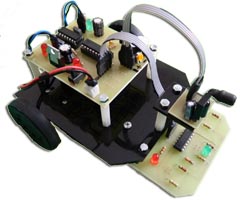
 Engelden kaçan robot devresi (ana devre + 2 adet engel sensörü) Engelden kaçan robot devresi (ana devre + 2 adet engel sensörü)
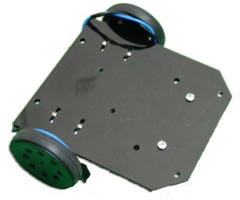
Lazer kesim pleksiglas robot gövdesi
2 adet 140 rpm redüktörlü DC motor
2 adet tekerlek
1 adet bilya tekerlek
9 V pil yuvası
Motor ve sensör kabloları
Plastik aralayıcılar
Vida, somun ve pullar
Motor bağlantı aparatı
Kit içerisindeki engelden kaçan robot devresinin elemanları monte edilmiştir. Lehimleme gerektirmez.
Engelden kaçan robot kiti montajı için silikon, bant ya da yapıştırıcı kullanılmasına gerek yoktur. Tüm parçalar vidalama işlemi ile birleştirilmektedir.
Engelden kaçan robot kitiniz kargolandıktan sonra mail adresinize gönderilecek dökümanlar içerisindeki montaj klavuzundaki adımları takip ederek robotunuzu çok kısa sürede kolaylıkla hazırlayabilirsiniz. Montaj sırasında silikon, yapıştırıcı ya da bant kullanmanıza veya lehim yapmanıza gerek yoktur.
Engelden kaçan robot kitinde PIC16F628A mikrodenetleyici kullanılmıştır.
Engel algılama sensörlerinin ve DC motorların kabloları ve soketleri hazırlanmıştır.
Robot devresi üzerindeki mikrodenetleyiciye engelden kaçan robot kodu yüklenmiştir ve devre test edilmiştir.
Engelden kaçan robot kiti 1 adet 9 V alkalin pil ile çalışmaktadır.
Robotunuzu çalıştırmanız 1 adet 9 V alkalin pil hediye olarak gönderilir.
Engelden kaçan robot kiti siparişiniz kargolandıktan sonra; montaj kılavuzu, robotun genel çalışma prensibini anlatan yazı, malzeme listesi, devre şeması, baskı devre şeması, kullanılan devre elemanlarının özellikleri ve fotoğraflar gönderilir.
Öğrenci projeleri için uygundur. Robot kiti üzerinde reklam amaçlı bir yazı ya da logo yer almamaktadır.
Engelden kaçan robot devresi epoksi baskı devre kartı üzerine hazırlanmış ve lehimleme işlemi elde yapılmıştır. Devre üzerinde lehim maskesi (yeşil boya) bulunmamaktadır.
| Engelden Kaçan Robot Kiti Videosu |
|
|

 SSS
SSS Sipariş Prosedürü
Sipariş Prosedürü İletişim
İletişim